- : measurement data
- : control data
- : state
Probabilistic Generative Laws (how we simplify the things)
State transition probability
This means only matters if we know .
Measurement probability
This means is sufficient to predict measurement .
More notations: If we try to predict before we got measurement , we got the posterior
From to is called correction or measurement update.
Bayes Filter Algorithm
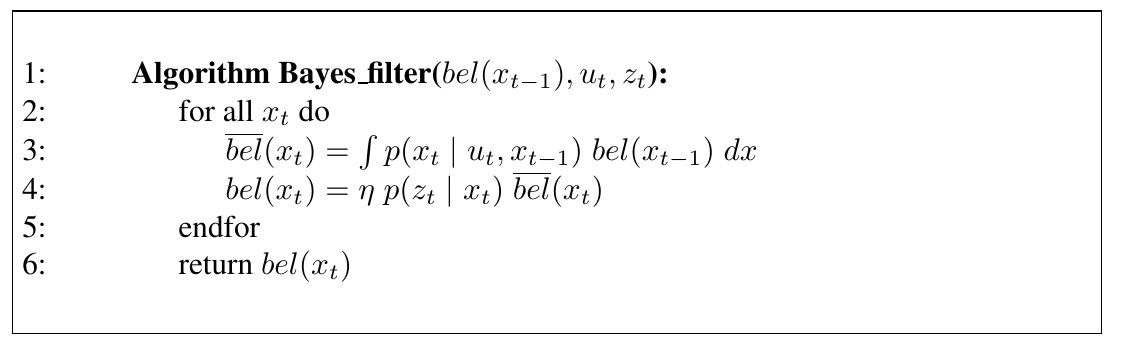
So unlike our previous definition, we now compute in a recursive fashion. In line 3, we do predict: given control, sum over all the probability assuming different In line 3, we do measurement update, take in and get the conditional probability on that. Obviously some Bayes rule kicks in.